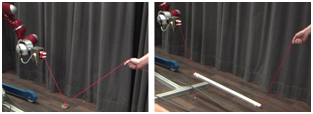

Within this work package, we plan to utilize several autonomous systems as case studies for validation of the control algorithms developed in WP1, WP2 and WP3. Our case studies will be based on our previous work on adaptive and optimal control of suspended load as well as on cooperative control of multiagent systems (see Figures 4 and 5, respectively). Besides our familiarity with them, these case studies represent challenging control problems since they bring together many of the open problems considered in the area of control systems: controllability of nonlinear systems, parameter-varying systems, optimality and convergence of solutions, stabilizability, exogenous disturbances, and presence of realistic exchange of information.
It is worth mentioning that different levels of modeling complexity and abstraction of these systems will result in different model classes (e.g., linear time-invariant dynamics, hybrid dynamics, switching dynamics, nonlinear time-varying dynamics, delayed systems, perturbed systems, systems with multiple equilibria, etc.). In other words, these control problems are versatile platforms for evaluation of and comparison between various control strategies. On the other hand, they represent a wide class of real-life systems ranging from traffic control, autonomous vehicles and aerial delivery to human-robot cooperation (Figure 4), wireless sensor/actuator networks and microgrids. The contribution within this work package is the application of novel control concepts on models representing real-life systems as well as controllability studies which will be useful in the design process of the corresponding real-life systems.